作者:Yuchuang Tong , Haotian Liu , and Zhengtao Zhang
翻译:太阳
编者按:
工信部此前发布的《人形机器人创新发展指导意见》,旨在推动人形机器人的研发创新和产业化应用,特别强调了人形机器人集成先进技术(人工智能、高端制造、新材料)的潜在颠覆性,将其视为未来产业的新赛道。对人形机器人的系统性论述,有助于我们更系统的了解该领域的发展历程和研究现状,通过对关键技术和面临挑战的全面分析,能够更清晰的认识未来的发展方向,把握人形机器人未来发展过程中的机会。
摘要:
文章全面论述了人形机器人的现状、进展和未来前景,强调其在推动下一代产业发展中的重要意义。通过综合多学科研究成果,全面分析各方面工作和关键技术,包括机器人本体结构、控制、决策、感知和交互,对人形机器人的研究现状做了详尽概述。同时,文章指出了该领域当前面临的全新挑战,特别强调了深入了解生物运动机制、改进结构设计、加强材料应用、提升先进的驱动和控制方法以及有效利用能源的必要性。技术创新使得人形机器人有望成为下一代产业的引领力量,重点强调仿生学、类脑启发智能、机械和控制的整合,认为这是开发先进人形机器人系统极具潜力的发展方向。
1.概念和特征
人形机器人通过精良设计,能够高效模仿人类外观和行为,熟练地复现人类感知、决策和交互等能力。该领域发展的主要目标是创造出能够在非结构化和动态环境中持续学习和适应的机器人产品,最终使人类受益并推动人类社会的进步。
与其他形式的机器人相比,人形机器人具有独特的优势。其类人设计,包括躯干、手臂和腿部等,增强了对以人类为中心的环境适应性,提高社会接受度,并能够进行复杂的交互。这种拟人化设计便于与人类进行自然交互,使其在医疗保健和教育等领域发挥重要价值。双足移动能力使人形机器人能够在人类空间中高效移动,而其先进的操作能力和灵巧性使其能够完成复杂的任务。人形机器人的认知能力提高了自主性和适应性。此外,其人机安全特性、社会接受度以及对人类环境的适应性,使其适合承担协作角色。不过在这些潜在优势下,人形机器人目前在平衡和能源效率等方面仍然存在诸多挑战,因此未来的持续研究对于充分发挥人形机器人在各个领域的应用潜力至关重要。
2.发展进程
人形机器人的探索始于20世纪70年代,并在21世纪初迎来显著的发展。从最初模仿人类外观和基本动作,逐步演变为拥有类人智能系统,这一进化过程可划分为三个阶段,如图1所示。首阶段始于20世纪60年代末,以早稻田大学等机构在双足行走机器人领域的先驱研究为代表。第二阶段以本田的人形机器人为标志,引入高度集成系统和感知控制技术,使机器人具备了基本感知和简单判断的能力。第三阶段由波士顿动力和特斯拉领导,实现了高度动态的运动和认知能力的显著提升,能够独立执行复杂任务。
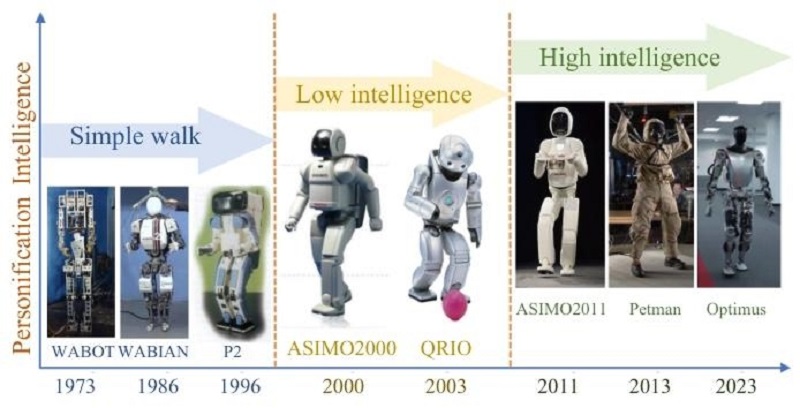
图1 人形机器人的历史进展
特斯拉等知名企业进入人形机器人领域,凸显了成熟创新企业涉足新技术领域的重要性。这些公司带来了资金、人才和社会的关注,这对于机器人等资本密集型领域至关重要。总的来讲,学术界通过奠定理论基础、开展早期研究,对培育创新理念做出贡献,而工业界则推动实际应用和规模化发展。
3.主要研发方向
人形机器人的发展呈现两大主要方向:一种是旨在外部仿真,即复制人类外观和功能。通过吸收对人类行为的理解,使机器人能够以类似于人类的方式执行任务,该方向在控制器设计方面仍存在一些挑战。另一种专注于内部模拟,创造具有人类内部结构的智能机器人,目标是建立与人类伙伴的共情和深度合作。到目前为止,全球范围内的研究团队在机器人的类人机制、脑启发算法、神经形态芯片和肌肉骨骼系统方面已取得了显著进展。
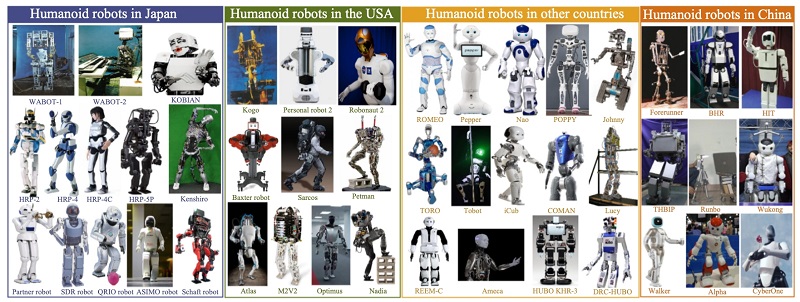
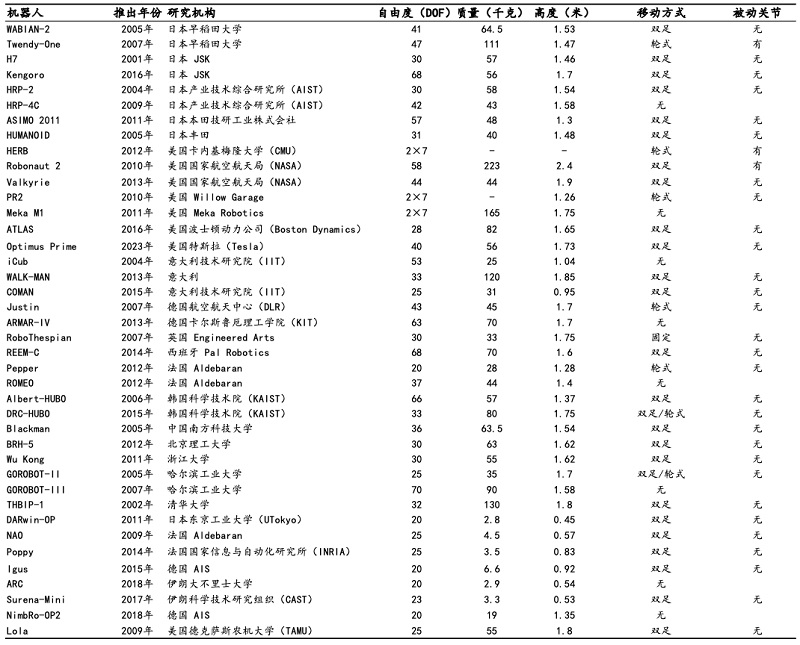
在日本,人形机器人的研究重点主要集中在形态模拟领域,特别强调了开发逼真的仿生机器人,以在服务型场景中应用。相较之下,在美国,人形机器人的研究注重于理解人脑的机制和功能模拟,在复杂环境中操作机器人方面取得了显著进展,为潜在的实际应用奠定了坚实的基础。许多其他国家的人形机器人研究受到美国和日本独特研究的启发和影响,推动了更多的创新研究和发展。图2展示了各国独特的人形机器人设计,每个机器人都具备独特的属性和能力。表1则进一步对一些代表性产品的性能参数情况做了展示。
图2 各个国家人形机器人的研究现状
表1 典型的人形机器人性能参数情况
4.本体机构与模块
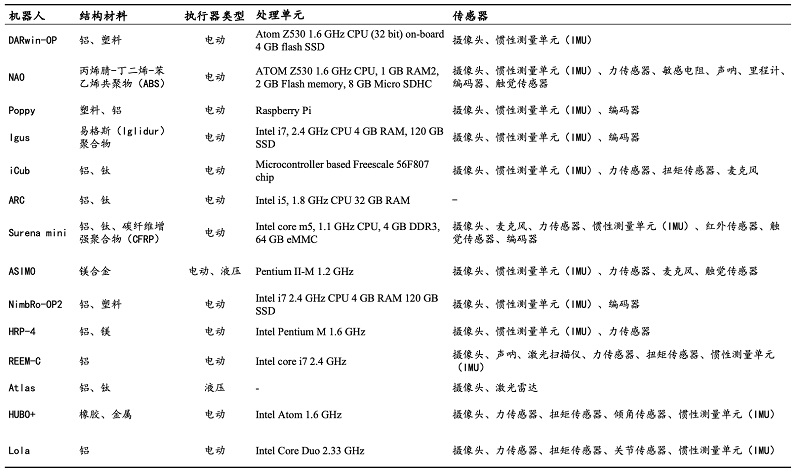
人形机器人的机械设计至关重要,其灵感源于人体复杂结构和微妙动作的巧妙组合。这种设计不仅在促进实际交互方面发挥关键作用,还为研究双足行走及相关领域提供了重要的研究平台。表1和表2通过对各种人形机器人参数的综合比较,包括自由度、重量、尺寸、电源和传感器等,能够展现不同机器人的能力和局限。
5.控制、驱动与决策
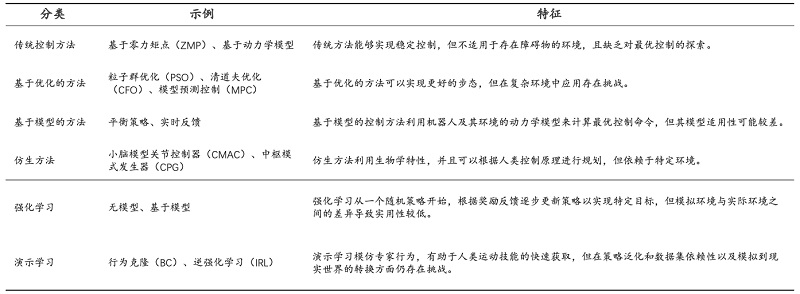
相较于人类的敏捷性和自主性,人形机器人尚存在明显差距。在控制、驱动和学习方法等方面的进步能够助推机器人实现所需的能力。设计精良的人形机器人致力于复制人体复杂结构,执行器模拟人体肌肉和关节,以实现逼真的动作。目前不同类型的执行器各具优缺点,影响着机器人的性能、效率和设计复杂性。人形机器人还通过从周围环境中学习,模仿人类思维和行为,自主决策执行各种任务,并在不同环境下,面对可预测和不可预测的情况进行适应。表3详细总结了当前人形机器人各种控制和学习方法的分类和各自特点。
6.关键技术与挑战
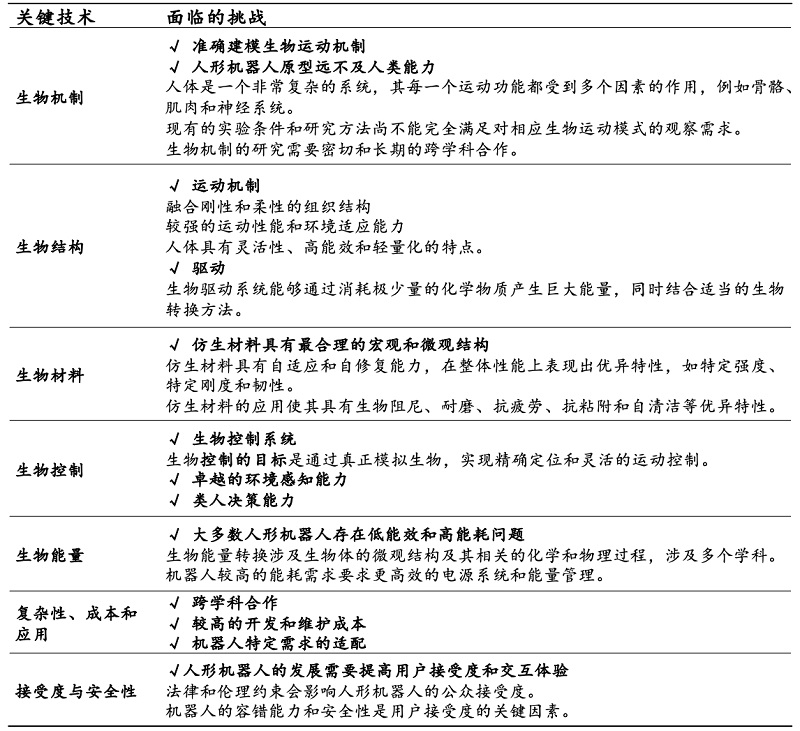
当前,人形机器人在发展过程中仍存在诸多不足,表4全面概述了人形机器人未来发展的关键技术和挑战,未来在生物学、材料科学、控制系统和能量转换等领域的跨学科合作具有十分重要的意义。
表4 人形机器人关键技术与挑战
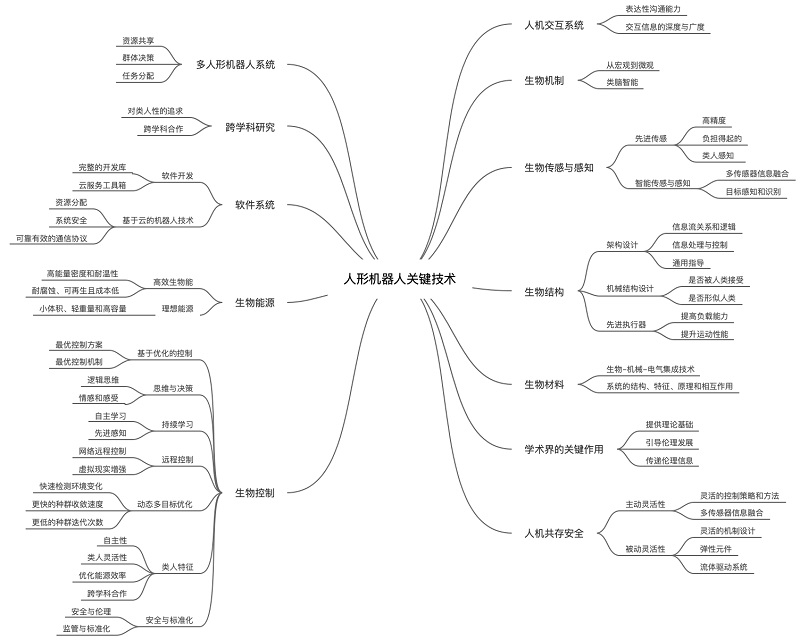
图3简明扼要地总结了人形机器人的关键技术。综合而言,人形机器人技术的未来在于跨学科合作和对生物学理解的不断突破。通过整合结构和生物材料,人形机器人将展现出更强大的功能,拓宽应用领域,并对人类生活的多个方面产生深远影响。随着研究和技术的不断进步,人形机器人成为社会不可或缺的一部分。
图3 人形机器人关键技术
7.未来潜在应用
人形机器人在人类生活的各个领域,包括军事、工业、救援任务、医疗保健、教育、辅助、娱乐和农业等,都具有广泛的应用潜力(图4),势必将推动下一代产业的发展。展望未来,人形机器人有望在日常生活应用中占据重要地位,成为最重要的智能机器人形式之一。
图4 人形机器人的潜在应用
原文链接:https://www.ieee-jas.net/en/article/doi/10.1109/JAS.2023.124140